
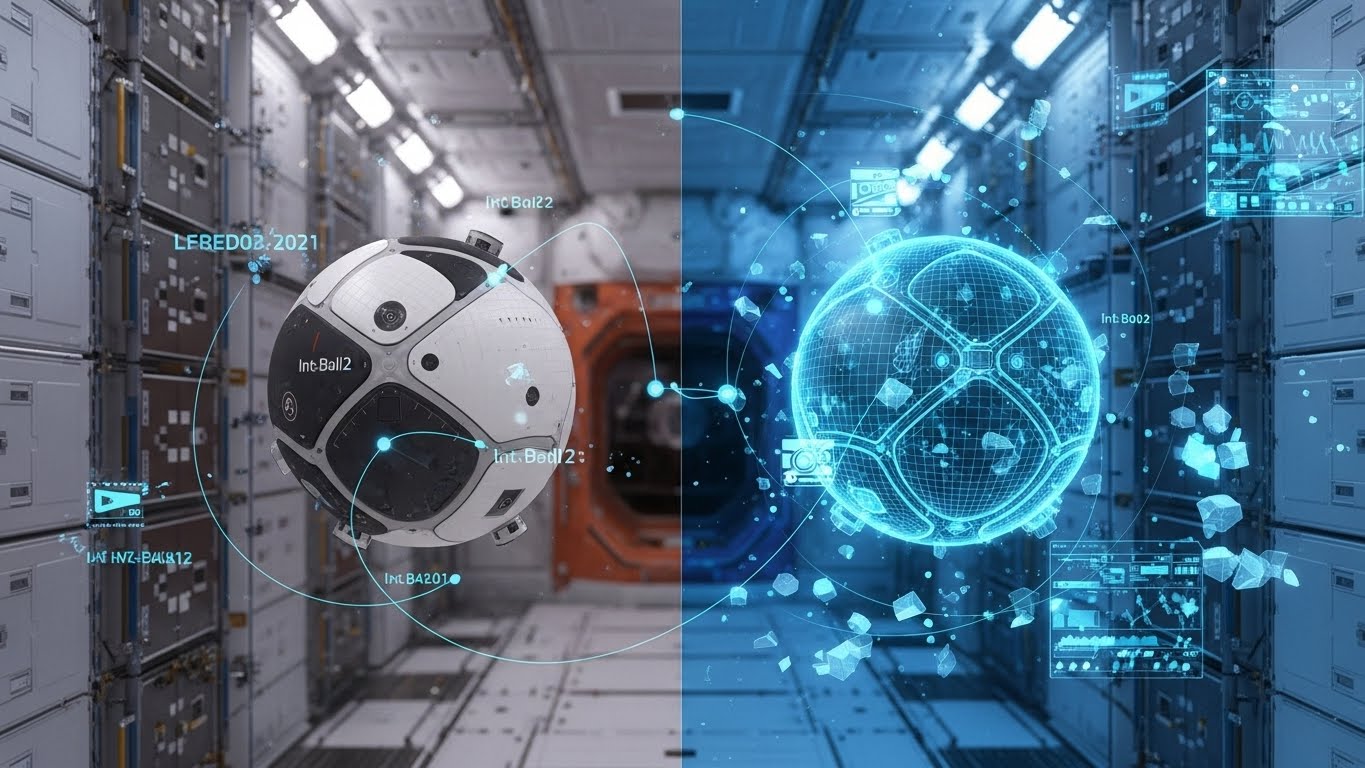
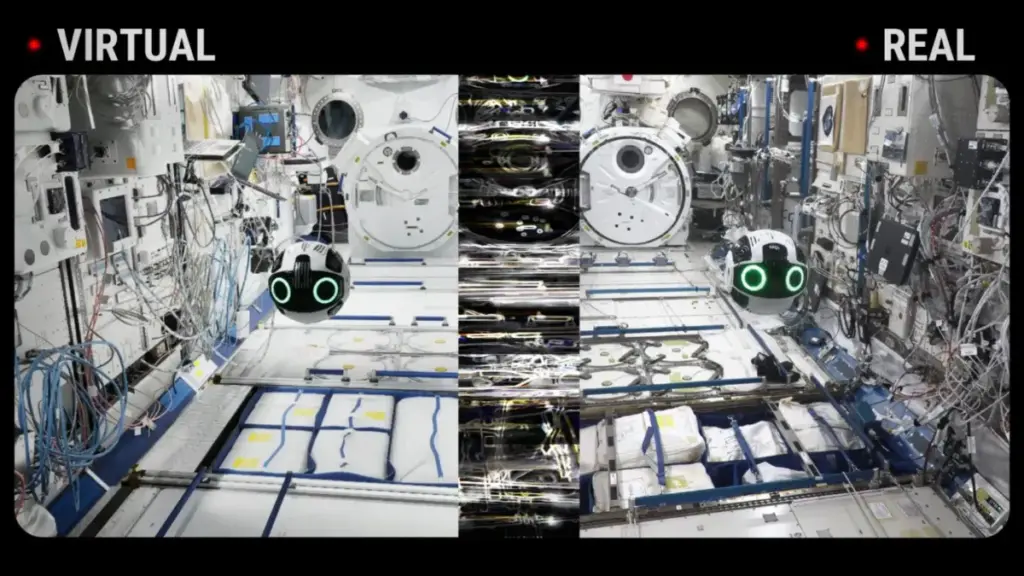
株式会社スペースデータは、国際宇宙ステーション(ISS)の「きぼう」日本実験棟で取得した船内ドローンロボット「Int-Ball2」の実動作データを用いて、同社が構築するISSデジタルツイン環境上での動作再現との比較実証を計6回完了した。比較に用いた実動作データは無償で公開された。
本実証はJAXAのきぼう有償利用制度を活用し、2025年5月に実施した軌道上実験で取得したInt-Ball2の動作ログをもとに行われた。公開データはInt-Ball2の実動作ログ(ROSのrosbag形式)で、誘導制御の目標値およびステータス、力・トルクコマンド、プロペラ駆動Duty比、IMUセンサ値、Visual SLAMによる自己位置推定結果を含む。データはHugging Faceからダウンロード可能である。
From: ![]() スペースデータ、Int-Ball 2の軌道上動作とISSデジタルツイン比較実証を完了し、データ無償公開へ
スペースデータ、Int-Ball 2の軌道上動作とISSデジタルツイン比較実証を完了し、データ無償公開へ
【編集部解説】
スペースデータによる今回の取り組みは、宇宙ロボット開発における「デジタルツイン」の実用性を検証する重要な一歩です。デジタルツインとは、現実世界の物体や環境を仮想空間上に再現する技術で、製造業や都市計画などで既に活用が進んでいますが、宇宙空間での精度検証は極めて限られています。
Int-Ball2は、JAXAが開発した球体型の船内ドローンで、宇宙飛行士の作業を撮影・記録することで業務効率化を図る目的で設計されました。微小重力環境下では、地上とは全く異なる物理法則が支配するため、ロボットの制御は高度な技術を要します。
今回の実証で注目すべきは、実際の軌道上データとデジタルツイン環境での再現データを定量的に比較した点にあります。誘導制御や自己位置推定といった複数の指標で乖離を測定することで、シミュレーションの精度向上に必要な改善点が明確になりました。
さらに重要なのは、取得データをROSのrosbag形式で無償公開した点です。ROSはロボット開発で広く使われる標準的なフレームワークであり、研究者や企業が容易にアクセスできる形式で公開することで、宇宙ロボット開発のエコシステム全体の底上げが期待されます。
この取り組みが実現すれば、宇宙でのロボット運用前に地上のシミュレーション環境で十分な検証が可能となり、開発コストと時間の大幅な削減につながります。従来は実際に宇宙へ打ち上げてからでないと分からなかった挙動を、事前に高精度で予測できるようになるのです。
一方で、デジタルツインの精度向上には膨大な実データの蓄積が不可欠です。微小重力環境特有の現象を完全に再現するには、まだ多くの検証が必要でしょう。また、オープンデータ化は技術の民主化を促進する反面、機密性の高い宇宙技術の取り扱いには慎重な判断が求められます。
長期的には、この技術が月面基地や火星探査ミッションにおけるロボット運用の基盤となる可能性があります。宇宙開発の加速には、こうした地道なデータ収集と検証の積み重ねが欠かせません。
【用語解説】
デジタルツイン
現実世界の物体、システム、環境をデジタル空間上に精密に再現する技術。センサーデータなどを活用してリアルタイムで状態を同期させることで、シミュレーションや予測分析が可能になる。製造業、都市計画、インフラ管理など幅広い分野で活用されている。
Int-Ball(イントボール)
JAXAが開発した国際宇宙ステーション(ISS)内で使用される球体型の船内ドローンロボット。正式名称はJEM Internal Ball Camera。宇宙飛行士の作業を自律的に撮影・記録することで、作業効率化を図る。Int-Ball2はその後継機。
ROS(Robot Operating System)
ロボット開発のためのオープンソースのソフトウェアフレームワーク。ロボット制御、センサー統合、シミュレーションなど、ロボット開発に必要な機能を提供する。世界中の研究機関や企業で標準的に使用されている。
rosbag
ROSで記録されたデータを保存するファイル形式。センサーデータ、制御コマンド、状態情報などを時系列で記録し、後から再生・解析できる。ロボット開発における標準的なデータ保存形式。
Visual SLAM
Visual Simultaneous Localization and Mapping の略。カメラ映像を用いて、ロボットが自己位置を推定しながら同時に周囲の地図を作成する技術。自律移動ロボットやドローンに不可欠な技術。
IMU(Inertial Measurement Unit)
慣性計測装置。加速度センサーとジャイロセンサーを組み合わせたデバイスで、物体の加速度や角速度を計測する。ロボットやドローンの姿勢制御に使用される。
Gazebo
オープンソースのロボットシミュレーター。物理エンジンを搭載し、現実に近い環境でロボットの動作をシミュレーションできる。ROSとの統合性が高く、ロボット開発で広く使われている。
Isaac Sim
NVIDIAが提供するロボティクスシミュレーションプラットフォーム。物理演算エンジンPhysXをベースに、高精度な物理シミュレーションとAI学習環境を提供する。
微小重力
重力がほぼ存在しない状態。国際宇宙ステーションでは地球の重力の約100万分の1程度の重力しか働かず、物体は浮遊状態となる。この環境下では地上とは異なる物理現象が発生する。
【参考リンク】
株式会社スペースデータ 公式サイト(外部)
宇宙とデジタル技術の融合により新産業創出を目指すスタートアップ。
Int-Ball2データセット – Hugging Face(外部)
今回公開された軌道上実動作データ。ROSのrosbag形式で提供。
JAXA「きぼう」日本実験棟(外部)
国際宇宙ステーションに設置された日本の実験棟の公式サイト。
ROS(Robot Operating System)公式サイト(外部)
ロボット開発のためのオープンソースフレームワークの公式サイト。
NVIDIA Isaac Sim(外部)
NVIDIAが提供するロボティクス向けシミュレーションプラットフォーム。
【参考動画】
【参考記事】
Digital Twin Technology in Space Exploration(外部)
NASAにおけるデジタルツイン技術の活用事例を紹介。
ROS in Space: How Robot Operating System is Used on the ISS(外部)
国際宇宙ステーションでのROS活用についての技術情報。
【編集部後記】
宇宙開発というと遠い世界の話に感じられるかもしれませんが、今回のデータ公開は私たちが宇宙技術に触れられる大きなチャンスです。ROSという標準的なフォーマットで公開されたことで、ロボティクスに興味のある方なら誰でもアクセスできます。
実際の宇宙空間で取得されたデータを解析できる機会は極めて貴重です。デジタルツインが宇宙開発をどう変えていくのか、皆さんはどのような可能性を感じますか。オープンデータ化が進む宇宙開発の未来を、ぜひ一緒に見守っていきましょう。