
2026年1月30日、NASAは歴史的な発表を行いました。Perseverance火星ローバーが、人間の介入なしにAIだけで経路を計画し、火星を走行することに成功したのです。2025年12月8日と10日に実施されたこの実証実験は、地球から2億キロメートル以上離れた場所で、AIが初めて独立した判断を下し実行した瞬間を記録しました。これは単なる技術的成功ではありません。宇宙探査における意思決定の主体が、人間からAIへと移行し始めた転換点なのです。
NASAのPerseverance火星ローバーが、人工知能によって計画された別の世界での初の走行を完了した。2025年12月8日と10日に実行され、南カリフォルニアのJet Propulsion Laboratoryが主導した。
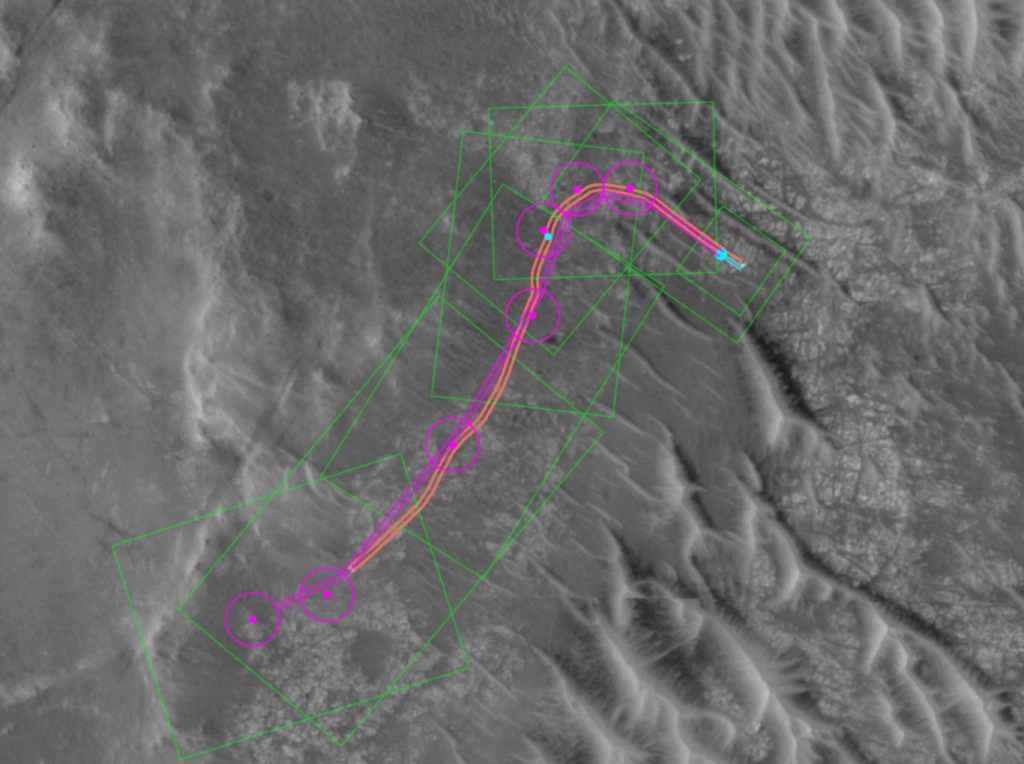
この実証では、生成AIを使用してPerseveranceのウェイポイントを作成した。JPLのローバー運用センターがAnthropicと協力し、同社のClaude AIモデルを使用した。ビジョン・ランゲージ・モデルと呼ばれる生成AIが、マーズ・リコネッサンス・オービターに搭載されたHiRISEカメラからの高解像度軌道画像とデジタル標高モデルからの地形傾斜データを分析し、ウェイポイントを含む連続した経路を生成した。
エンジニアリングチームはJPLのデジタルツインを通じて50万以上のテレメトリー変数を検証した。12月8日、Perseveranceは689フィート(210メートル)を走行し、2日後に807フィート(246メートル)を走行した。
From: ![]() NASA’s Perseverance Rover Completes First AI-Planned Drive on Mars
NASA’s Perseverance Rover Completes First AI-Planned Drive on Mars
【編集部解説】
2025年12月、火星のジェゼロ・クレーターで歴史的な瞬間が訪れました。NASAのPerseveranceローバーが、人間の指示を一切受けることなく、AIが計画した経路を自律的に走行したのです。これは単なる技術的成功ではありません。地球から2億キロメートル以上離れた場所で、AIが初めて独立した判断を下し、それを実行に移した瞬間なのです。
火星探査における最大の制約は、通信遅延です。地球と火星の間で信号が往復するには約40分かかります。この遅延により、ジョイスティックによるリアルタイム操作は不可能であり、過去28年間、ローバーの経路は地球上の人間のドライバーによって慎重に計画されてきました。彼らは高解像度の軌道画像と地形データを何時間もかけて分析し、100メートルごとにウェイポイントを設定し、それをNASAのディープスペースネットワーク経由で火星に送信してきたのです。
今回の実証実験で使用されたのは、AnthropicのClaude AIモデルです。このAIは「ビジョン・ランゲージ・モデル」と呼ばれる技術を用いており、画像を見て理解し、それを言語として解釈する能力を持っています。Claudeは、マーズ・リコネッサンス・オービターに搭載されたHiRISEカメラが撮影した火星表面の高解像度画像と、デジタル標高モデルから得られる地形の傾斜データを分析しました。岩盤、露頭、危険な岩石地帯、砂の波紋といった重要な地形の特徴を識別し、Perseveranceが安全に進める連続した経路を生成したのです。
しかし、AIが生成した経路をそのまま火星に送信するわけではありません。JPLのエンジニアリングチームは、「デジタルツイン」と呼ばれるPerseveranceの仮想レプリカを使用し、50万以上のテレメトリー変数を検証しました。ローバーの姿勢、車輪の角度、バッテリー消費、通信状態など、あらゆるパラメータがシミュレーションされ、AIの指示がフライトソフトウェアと完全に互換性があることが確認されてから、初めてコマンドが火星に送信されたのです。
12月8日、Perseveranceは生成AIのウェイポイントをメモリに格納し、210メートルを走行しました。2日後には246メートルを走行し、合計456メートルの自律走行に成功しました。これは火星での1周400メートルのトラック1周分以上に相当します。距離としては小さく見えるかもしれませんが、その意義は計り知れません。
JPLの宇宙ロボット工学者ヴァンディ・ヴェルマ氏は、「生成AIの基本的な要素は、惑星外での運転のための自律ナビゲーションの柱である、知覚、位置特定、計画と制御を合理化する上で、大きな可能性を示しています」と述べています。知覚とは岩や波紋を見ること、位置特定とは自分がどこにいるかを知ること、計画と制御とは最も安全な経路を決定し実行することです。これら3つの要素すべてにおいて、生成AIは人間の作業負荷を大幅に軽減できる可能性を示したのです。
さらに重要なのは、この技術が将来の深宇宙探査にもたらす影響です。木星の衛星エウロパや土星の衛星エンケラドゥスへの探査ミッションでは、地球との通信遅延は片道で1時間以上になります。このような環境では、リアルタイムでの人間の介入はさらに困難になります。AIが自律的に判断し、キロメートル規模の移動を安全に実行できる能力は、これらの遠隔ミッションにとって不可欠なのです。
JPLの探査システムオフィスのマネージャーであるマット・ウォレス氏は、「地球上だけでなく、NASAのエンジニア、科学者、宇宙飛行士の集合的な知恵で訓練された、ローバー、ヘリコプター、ドローン、その他の表面要素におけるエッジアプリケーションでのインテリジェントシステムを想像してください」と語っています。これは、月への恒久的な人間の存在に必要なインフラストラクチャとシステムを確立し、米国を火星、そしてその先へ連れて行くために必要な、ゲームチェンジングな技術なのです。
今回の実証実験は、AIが単なる補助ツールではなく、宇宙探査における真のパートナーになりつつあることを示しています。人間の知恵とAIの計算能力が融合することで、私たちは太陽系のさらに遠くへ、より効率的に、より安全に到達できるようになるでしょう。火星での456メートルの走行は、人類の宇宙探査における新たな一歩なのです。
【用語解説】
ウェイポイント
ローバーが次の指示を受け取る固定された位置座標のこと。火星探査では通常100メートル以内の間隔で設定され、ローバーはこれらの地点を順番に目指して移動する。人間の計画者が地形データを分析して設定してきたが、今回のAIはこのウェイポイントの生成を自動化した。
ビジョン・ランゲージ・モデル
画像と言語の両方を理解し処理できる生成AIの一種。画像データを解析して意味を理解し、それを言語として表現したり、言語による指示に基づいて画像を処理したりできる。Perseveranceの経路計画では、火星の軌道画像を分析して安全なルートを判断するために使用された。
HiRISEカメラ
High Resolution Imaging Science Experimentの略。NASAのマーズ・リコネッサンス・オービターに搭載された高解像度カメラで、火星表面を詳細に撮影する。今回のAI経路計画では、このカメラが撮影した軌道画像がAIの判断材料として使用された。
テレメトリー
遠隔地にある機器から送信される計測データや状態情報のこと。Perseveranceローバーの場合、位置、速度、姿勢、温度、バッテリー状態など、様々な動作パラメータが地球に送信される。
ソル(sol)
火星での1日を表す単位。火星の自転周期は地球より約40分長く、1ソルは24時間39分35秒。今回の実証実験は火星日(ソル)1707日目と1709日目に実施された。
【参考リンク】
NASA Mars Exploration(外部)
NASAの火星探査プログラム公式サイト。Perseveranceローバーの最新情報を掲載。
NASA Jet Propulsion Laboratory (JPL)(外部)
ローバー運用センターの本拠地。Perseveranceローバーの運用を担当。
Anthropic(外部)
Claude AIモデルを開発。今回JPLと協力してAI経路計画を提供した企業。
Mars Reconnaissance Orbiter(外部)
HiRISEカメラを搭載した火星探査機。高解像度画像を提供している。
【参考動画】
【参考記事】
NASA’s Perseverance Mars rover completes its 1st drive planned by AI(外部)
Space.comによる詳細な技術解説記事。合計456メートルの走行を報告。
NASA Perseverance Rover Completes Historic Mars Drive(外部)
ZME Scienceによる記事。過去28年間の経路計画の歴史的背景を解説。
Artificial Intelligence just drove NASA’s robotic rover on Mars(外部)
BBC Sky at Night Magazine。自律ナビゲーション3つの柱を詳述。
NASA’s Perseverance rover completes the first AI-planned drive(外部)
ScienceDaily。50万以上のテレメトリー変数検証プロセスを詳述。
【編集部後記】
火星という2億キロメートル以上離れた場所で、AIが初めて独自に経路を判断し、ローバーを動かしました。この出来事は単なる技術的成功を超えて、人類が宇宙を探査する方法そのものの転換点かもしれません。通信に片道20分かかる環境で、AIはどこまで自律的に判断すべきなのでしょうか。
また、さらに遠い木星や土星の衛星を探査する未来では、AIはどのような役割を担うのでしょうか。地球から遠く離れた場所での「意思決定」について、改めて考える機会なのかもしれませんね。

がもたらす「アンテザード・ソサエティ」の衝撃-300x200.png)