
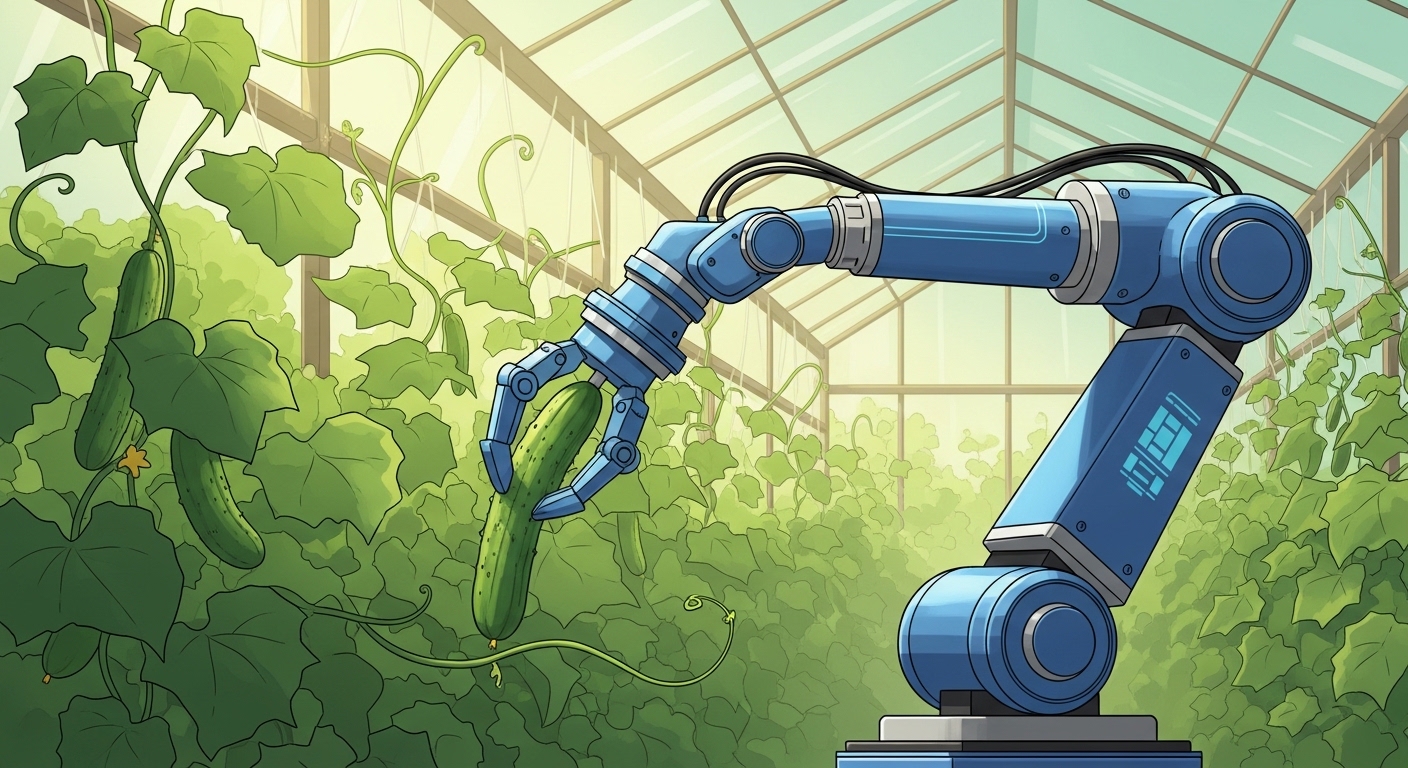
安川電機とJA全農(全国農業協同組合連合会)が共同開発を進めてきた「きゅうり収穫作業ロボット」が、佐賀県の実証農場「ゆめファーム全農SAGA」にて農業現場での稼働を開始しました。
両者は2018年から業務提携を行い、畜産・農業生産・流通販売の3分野を中心に自動化技術の検討を進めてきました。農業生産分野では、2024年にきゅうりの「葉かき作業」を自動化するロボットを同農場に導入済みでしたが、今回新たに「収穫作業」の自動化にも一定の成果を確認し、葉かきと収穫の両機能を1台に統合したロボットとして現地導入を実施しました。
きゅうりの収穫では、出荷規格に適合した大きさの果実を判別し、茎やつる、葉が複雑に入り組んだ栽培環境の中から果実を傷つけることなく収穫してコンテナへ収納する必要があります。場所や時期による環境条件の変動が大きく、従来はロボットによる安定した作業が困難でした。今回、人が行う収穫作業の判断や動作の曖昧さをデータに置き換え、状況に応じてロボットが最適な動作を判断する技術を開発したことで、実用化の目途が立ったとしています。
安川電機は今後、施設園芸農業に分類されるトマトやナスなど他の作物への水平展開を推進し、JA全農との協業を通じて日本農業の発展と食の安定供給への貢献を目指すとしています。
From: JA全農と協業開発を進める「きゅうり収穫作業ロボット」の農業現場での稼働開始について|安川電機

【編集部解説】
今回の発表が注目に値するのは、産業用ロボットの世界的大手が、工場の外へ——しかも最も自動化が困難とされる農業の「収穫」という領域へ、本格的に踏み出した点にあります。
安川電機は1977年に日本初の全電気式産業用ロボット「MOTOMAN」を発売して以来、累計50万台以上を世界に出荷してきたロボットメーカーです。その技術の蓄積が、今回のきゅうり収穫ロボットの基盤となっています。なお同社は2023年末に、NVIDIA製GPUを標準搭載しAIと一体化した自律型ロボット「MOTOMAN NEXT」シリーズを発売しています。農業ロボットとの直接的な関係は明示されていませんが、環境を認識して自ら判断する「未自動化領域」への取り組みは、今回のきゅうり収穫ロボット開発と技術的な方向性を共有するものといえます。
きゅうりの収穫がなぜロボットにとって極めて難しいのか、少し補足が必要でしょう。工場の生産ラインでは、製品の大きさや形状が均一に規格化されています。一方、きゅうりは一本一本の大きさ、形状、熟度が異なり、茎やつる、葉が複雑に絡み合う環境で生育します。さらに出荷規格に適合するサイズかどうかを瞬時に見極め、果実を傷つけずに摘み取る繊細さも求められます。海外の学術研究では、温室環境でのきゅうり収穫ロボットの成功率が50〜80%程度にとどまるという報告もあり、この作業の自動化は世界的に見ても発展途上の技術課題といえます。
今回のロボットが技術的に興味深いのは、「葉かき」と「収穫」という2つの異なる作業を1台に統合した「多能工化」のアプローチです。農業ロボットにおける最大のビジネス上の障壁は、収穫が年間の限られた期間にしか発生しないため、ロボットの稼働率が低くなり投資回収が困難になることです。安川電機はこの問題に対し、1台のロボットに複数の作業を担わせることで、稼働率と費用対効果を高めるという戦略を取っています。
この発表の背景には、日本農業の構造的な危機があります。2025年の農林業センサスによれば、農業経営体数は10年間で約55万件減少し、82万8000件となりました。基幹的農業従事者の平均年齢は68歳前後とされており、労働力の絶対数が不足する中で、自動化技術の社会実装はもはや選択肢ではなく必然となっています。
一方で、実用化に向けた課題も見落とせません。まず、高度なAIロボットの導入コストを個々の農家が負担できるのかという経済性の問題があります。JA全農との協業では、複数の農家でロボットを共有するモデルも検討されているとされますが、具体的な価格や運用スキームはまだ明らかになっていません。また、場所や時期で大きく変動する栽培環境への適応力が、実証農場の外でどこまで通用するかという汎用性の検証も今後の焦点となるでしょう。
安川電機は今後、トマトやナスといった施設園芸作物への水平展開を目指すとしています。施設園芸は環境制御技術との親和性が高く、スマート農業の導入が最も進みやすい分野です。産業用ロボットの巨人が農業分野で実績を積み上げていくことは、日本の食料安定供給という国家的課題に対する一つの回答になり得ます。なお、JA全農側の報道によれば、今後は現場での稼働を通じて改善を重ね、製品化に向けた磨き上げを進める段階にあるとのことです。この取り組みがどう結実するか、引き続き注視する価値があります。
【用語解説】
葉かき作業
きゅうりの栽培過程で、光合成能力が低下した古い葉や重なった葉を取り除く作業のこと。新しい葉への日照や通気性を確保し、果実の生育を促進する目的で行われる。手作業で行うのが一般的で、収穫と並ぶ労働負荷の高い工程である。
モーション技術
モーター制御を中心とした精密な動作制御技術の総称。安川電機はサーボモータを自社開発し、ロボットアームの位置・速度・力を高精度に制御する技術を蓄積してきた。今回の農業ロボットでも、果実を傷つけない繊細な動作の実現に応用されている。
多能工化
1台のロボットに複数の異なる作業を担わせる設計思想。農業では収穫が特定の期間に集中するため、1つの作業だけでは年間を通じた稼働率が低くなる。葉かきと収穫を同一ロボットに統合することで、投資対効果を高める狙いがある。
施設園芸農業
ビニールハウスやガラス温室などの施設内で行う農業の総称。環境制御技術との親和性が高く、温度・湿度・日照をコントロールできるため、ロボットの導入が最も進めやすい農業形態とされる。
農林業センサス
農林水産省が1950年から5年ごとに実施している、農林業の実態を明らかにするための基幹統計調査。農業経営体数、就業者数、耕地面積などの基礎データを提供し、農業政策の立案基盤となっている。
【参考リンク】
安川電機 公式サイト(外部)
1915年創業の産業用ロボット・サーボモータ・インバータの世界的メーカー。「MOTOMAN」で知られる。
JA全農(全国農業協同組合連合会) 公式サイト(外部)
日本の農畜産物の販売・生産資材供給を行う全国組織。安川電機とは2018年より業務提携を締結。
ゆめファーム全農SAGA 紹介ページ(JA全農ウィークリー)(外部)
佐賀県の実証農場でのきゅうり葉かきロボットやいちご選果ロボットなどの協業事例を紹介している。
安川電機 産業用ロボット紹介ページ(外部)
MOTOMANシリーズの製品ラインアップや自動車・食品・物流など産業別の活用事例を掲載。
【参考記事】
Human-centered approach for an efficient cucumber harvesting robot system(ScienceDirect)(外部)
きゅうり収穫ロボットの実地試験で成功率56.6%を報告した韓国の研究チームによる学術論文(2023年)。
Field Test of an Autonomous Cucumber Picking Robot(ScienceDirect)(外部)
オランダIMAG研究所による温室きゅうり収穫ロボットの実地試験論文。平均成功率74.4%を記録(2003年)。
農家数は10年で約55万件減少〜農林業センサス2025(SMART AGRI)(外部)
2025年農林業センサスの概数値を分析。農業経営体82万8000件、10年で約55万件減少の実態を報告。
Lightweight robots harvest cucumbers(ScienceDaily)(外部)
EU・CATCHプロジェクトによるきゅうり収穫用双腕軽量ロボット開発の紹介記事(2018年)。
Realizing an intelligent agricultural robot(ScienceDirect)(外部)
農業収穫ロボット技術全般を俯瞰した学術論文。社会実装と商業化はいまだ限定的と総括(2025年)。
日本の農業の課題とは?現状と解決へのアプローチ(Asana)(外部)
基幹的農業従事者の平均年齢が68.4歳に上昇、従事者数が122.6万人に減少した現状を報告。
【編集部後記】
今回の安川電機とJA全農のきゅうり収穫ロボットは、「工場で生まれた技術が、畑の未来を変える」可能性を示す一歩です。
農作物の収穫は、形も大きさも異なる一つ一つの実を見極め、傷つけずに摘み取るという、ロボットにとって最も苦手な「曖昧さ」の塊のような作業です。それを産業用ロボット50万台の実績で培った技術とAIで乗り越えようとしている点に、この取り組みの本質があります。
ただし、現段階では実証農場での稼働開始であり、製品化に向けた磨き上げはこれからです。導入コストや多様な栽培環境への汎用性など、越えるべきハードルも残されています。
日本の農業経営体は10年で約55万件減少し、担い手の高齢化は待ったなしの状況です。テクノロジーが「人の代わり」ではなく「人と共に」農業を支える未来像が、この佐賀の温室から見えてくるかもしれません。innovaTopiaでは、今後のトマトやナスへの展開を含め、続報を追いかけていきます。