
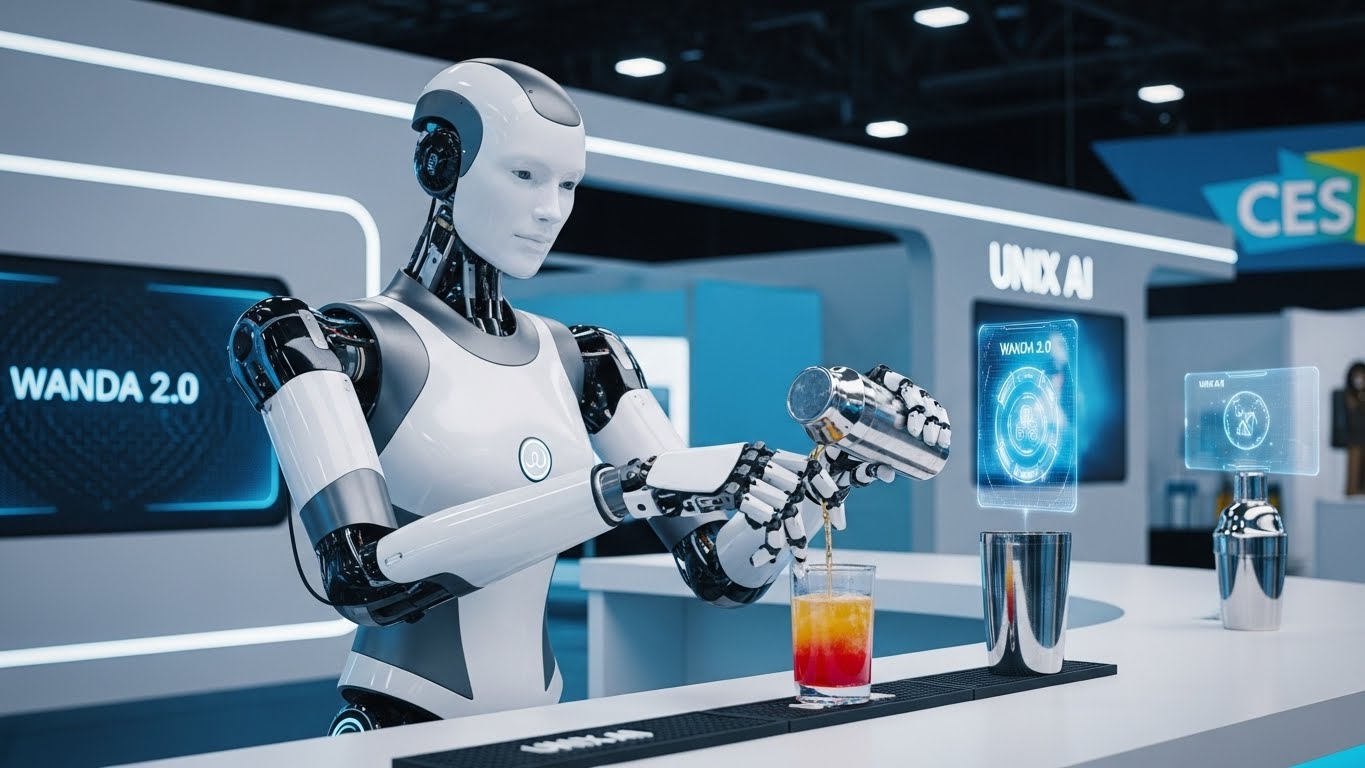
ヒューマノイドロボットが展示会の華やかなデモから、ホテルや家庭で実際に働く存在へと変わろうとしている。中国・蘇州のUniX AIは月間100台の生産体制を確立し、CES 2026で世界初の量産8自由度バイオニックアームを搭載した「Wanda 2.0」を披露する。
UniX AIは2026年1月2日、CES 2026(ブース番号10815、ノースホール、LVCC)にてフルサイズヒューマノイドロボットWanda 2.0およびWanda 3.0を展示すると発表した。会場には3つのシナリオベース体験ゾーンとして、カクテル作成インタラクティブゾーン、家庭シナリオゾーン、ホテル客室ゾーンを設置する。
Wanda 2.0は23の高自由度関節と世界初の量産8自由度バイオニックアームを搭載し、マルチモーダルセマンティックキーポイントと効率的な軌道模倣学習フレームワークに基づいて構築されている。同社は月間100台の安定した納品能力を確立し、ホテル、不動産管理、セキュリティ、小売、研究・教育などのシナリオにわたるソリューションを提供している。
UniX AIは2024年に中国・蘇州で設立され、創設者兼CEOはFengyu Yang氏である。
From: ![]() UniX AI to Bring Delivered Full-Size Humanoid Robot Wanda 2.0 to CES 2026
UniX AI to Bring Delivered Full-Size Humanoid Robot Wanda 2.0 to CES 2026
【編集部解説】
今回のUniX AIによるCES 2026への出展は、ヒューマノイドロボット産業における重要な転換点を示しています。これまで多くのヒューマノイドロボットは展示会で華々しくデモンストレーションされるものの、実際の商業環境での継続的な運用実績は限られていました。
UniX AIが強調する「実証段階から検証・スケーリング段階への移行」という表現は、単なるマーケティング文句ではありません。月間100台という具体的な生産能力を確立し、すでに中国国内で納品実績を持つという点が、他の多くのプロトタイプ展示とは一線を画します。
技術的な観点から注目すべきは、UniFlex、UniTouch、UniCortexという3つの独自フレームワークの統合です。UniFlexは効率的な模倣学習を可能にし、ロボットが人間の作業を観察して学習できる仕組みを提供します。UniTouchは視覚と触覚を統合したマルチモーダルモデルで、物体の識別だけでなく適切な力加減での操作を実現します。UniCortexは長期シーケンスのタスク計画を担当し、複数の工程を伴う作業を自律的に遂行する能力を与えます。
23の高自由度関節と世界初の量産8自由度バイオニックアームという仕様は、人間の腕の動きに近い繊細な操作を可能にします。カクテル作成、皿洗い、ベッドメイキングといった具体的なタスクは、一見単純に見えますが、実際には物体認識、経路計画、力制御の高度な統合が必要となる作業です。
ホテル、不動産管理、セキュリティ、小売、研究・教育という幅広い展開先を掲げている点も興味深い戦略といえます。特にホテル業界は世界的な人手不足に直面しており、反復性の高い清掃やアメニティ補充といった業務は、ヒューマノイドロボットの初期導入先として合理的な選択です。
一方で、商業展開における課題も存在します。月間100台という生産規模は、グローバル市場の需要を考えると依然として限定的といえます。また、異なる国や地域での規制対応、文化的な受容性、メンテナンス体制の構築といった実務的なハードルが待ち構えています。
興味深いのは、2024年設立という新興企業でありながら、イェール大学、スタンフォード大学、上海交通大学、北京大学などの世界トップクラスの研究機関出身者を集めた学術的基盤を持つ点です。中国のエンボディードAI企業が「コスト優位性の提供者から成熟製品の輸出者へ」と自己定義する姿勢は、グローバル市場における中国テック企業の立ち位置の変化を象徴しています。
業界予測によれば2026年から2028年にかけて、ヒューマノイドロボット市場全体が主流採用期に入るとされる中、UniX AIのCES出展は単なる製品発表ではなく、実用化競争における先行者利益を狙った戦略的な動きと捉えるべきでしょう。
【用語解説】
エンボディードインテリジェンス(Embodied Intelligence / エンボディードAI)
AIを物理的なシステムに統合し、実世界と相互作用させる技術である。従来の情報処理型AIとは異なり、センサーやコンピュータビジョン、機械学習を融合させることで、物理環境を認識し、推論し、行動することが可能になる。ロボットや自動運転車などに応用され、デジタル領域から物理世界への移行を意味する。
自由度(DoF:Degrees of Freedom)
ロボットが独立して動かせる方向や軸の数を示す指標である。各関節が回転または直線運動を行う能力を表し、自由度が高いほどロボットは複雑で柔軟な動きが可能になる。人間の腕は約7自由度を持ち、ヒューマノイドロボットは全身で30以上の自由度を持つことが一般的である。
バイオニックアーム(Bionic Arm)
生物学的な構造を模倣した人工の腕である。人間の腕の動きや機能を再現するために設計され、複数の関節と駆動機構を組み合わせることで、自然な動作と高い器用性を実現する。医療用義肢からロボット工学まで幅広く応用される。
マルチモーダルモデル(Multimodal Model)
複数の異なる種類のデータ(視覚、聴覚、触覚など)を統合的に処理するAIモデルである。単一のセンサー情報だけでなく、複数の感覚情報を組み合わせることで、より正確で総合的な環境認識と判断が可能になる。
模倣学習(Imitation Learning)
人間やエキスパートの動作を観察し、それを模倣することで学習するAI技術である。強化学習とは異なり、実演データから直接行動パターンを学習するため、効率的にタスクを習得できる。ロボット工学において、少ないデモンストレーションから複雑な作業を学習させる手法として注目されている。
【参考リンク】
UniX AI 公式サイト(外部)
中国・蘇州の汎用ヒューマノイドロボット開発企業。Wandaシリーズの製品情報とUniFlex、UniTouch、UniCortexの技術詳細を掲載。
CES 2026 公式サイト(外部)
世界最大級のテクノロジーイベントCESの公式サイト。2026年1月6日から9日までラスベガスで開催され、最先端技術が集結。
NVIDIA – Embodied AI 解説ページ(外部)
エンボディードAIの概念、技術要素、応用分野を詳細に解説。シミュレーション環境での強化学習やヒューマノイドロボットへの応用例を紹介。
【参考動画】
Wanda 2.0, UniX AI’s second-generation full-size humanoid robot
UniX AI公式チャンネル(2025年12月公開、1分57秒)。Wanda 2.0の実際の動作を紹介。23の高自由度関節、8自由度バイオニックアーム、適応型インテリジェントグリッパーを搭載し、家庭および商業環境での実用作業をデモンストレーションしている。
【参考記事】
UniX AI pushes humanoid robots beyond demos and into service(外部)
ヒューマノイドロボット産業が実証段階から実用段階へ移行する状況を解説。技術スタックと展開戦略を分析している。
About UniX AI – UniX AI Official(外部)
UniX AI公式サイトの企業情報。2024年設立、量産体制と世界トップクラス研究機関出身者の人材構成、競技会での受賞実績を掲載。
How Youliqi Demonstrates Humanoid Robot Algorithmic Capabilities(外部)
UniX AIの3つの独自アルゴリズムスイートを技術的に解説。UniFlex、UniTouch、UniCortexの各機能と実用環境での設計思想を説明。
Embodied Intelligence: From Lab Concept to Production Reality(外部)
エンボディードインテリジェンスの概念を詳細に解説。知覚、判断、実行の緊密なフィードバックループと実世界への適応方法を説明。
Humanoid Robots Global Market Report 2026-2040(外部)
ヒューマノイドロボット市場の長期予測。2026年から主流採用期に入り、2040年には380億ドル市場に成長すると予測している。
【編集部後記】
ヒューマノイドロボットが「デモから実用へ」と移行する今、私たちの生活や働き方はどう変わっていくのでしょうか。月間100台という生産規模はまだ限定的ですが、ホテルや家庭での具体的なタスクをこなせる段階まで来ていることに驚きます。
皆さんがもし自宅やオフィスにヒューマノイドロボットを迎え入れるとしたら、どんな作業を任せたいですか?それとも、まだ人間が担うべき領域があると感じますか?CES 2026での実機デモが、この問いへのヒントを与えてくれるかもしれません。