
人とロボットが同じフロアで自然にすれ違い、お互いの動きを「先読み」しながら働く、そんな光景が、少しずつ現実に近づいてきました。
富士通が発表した「空間World Model技術」は、空間そのものに“頭脳”を持たせることで、物理世界における人とロボットの協調の当たり前を塗り替えようとしています。
富士通株式会社は、人とロボットが同じ空間で協調して動けるようにする「空間World Model技術」を開発した。
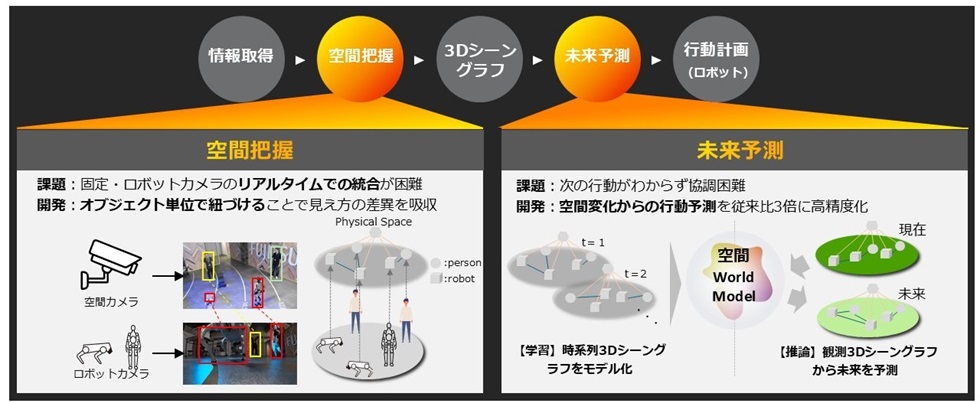
この技術は、空間内の人・ロボット・モノを3Dシーングラフとして捉え、その相互作用と時系列変化から未来の状態を予測するPhysical AIである。 これにより、通路が固定された工場や倉庫だけでなく、人の動きや物の配置が変化しやすいオフィスや商業施設といった一般環境でも、人とロボット、複数ロボットの協調動作が可能になるとしている。
これは2025年4月に設立された空間ロボティクス研究センターの成果として位置づけられ、2026年1月6日から9日に米国ラスベガスで開催されるCES2026でのデモ出展や、Fujitsu Technology Parkなどでの技術実証が予定されている。 また、学術用ベンチマークデータセットJRDB-Social上で、他者の行動意図推定精度を従来比3倍に向上できたと報告されている。
From: ![]() 人とロボットが共存・協働する未来を拓く 空間World Model技術を開発
人とロボットが共存・協働する未来を拓く 空間World Model技術を開発
【編集部解説】
富士通が打ち出した「空間World Model技術」は、人とロボットが同じ空間で動きながら、お互いの次の一手を読み合うための基盤づくりと言えます。 これまでロボットは、決められた通路や整ったレイアウトの環境に強い一方で、人の動きやモノの配置が常に変化するリアルな空間では扱いづらさが残っていました。 その前提をひっくり返そうとしているのが、「空間そのものをモデルとして学習させる」という今回のアプローチです。
この技術の肝は、単にカメラ映像を統合するのではなく、人・ロボット・モノをノードとする3Dシーングラフとして空間全体を表現し、その時系列変化から行動意図と未来の状態を推定する点にあります。 防犯カメラのような固定カメラと、ロボット搭載カメラのような移動カメラを、画素単位ではなく「オブジェクト単位」で統合することで、視野や歪みの違いを吸収しながらリアルタイムに空間を把握できるようにしています。 その結果、「この人は次にあの棚へ向かいそうだから、ロボットは別ルートを通る」といった先回りの判断が可能になります。
インパクトが大きいのは、適用領域が工場や倉庫のような整備された環境にとどまらず、オフィスや商業施設、病院といった「人が主役の空間」に広がっていく点です。 清掃ロボットや搬送ロボットが人の動線を読んで自然に避けたり、複数ロボットが互いの動きを見越してタスクを分担したりといったシーンが、現実的な選択肢に近づきます。 労働力不足への対応という文脈でも、「人をロボットで置き換える」のではなく、「人とロボットが同じフロアで共存する」という方向性を後押しする技術だと感じます。
ただし、空間全体を理解し、人の行動意図や未来の動きを推定できるということは、強力な監視インフラにもなり得るということでもあります。 行動履歴がどの粒度で保存されるのか、誰がどの範囲までアクセスできるのか、どのように匿名化・集約されるのかといった設計と運用は、この種の技術と切り離せません。 利便性とプライバシーのバランスをどう取るのか、規制やガイドラインとの関係も含めて、今後の実証プロジェクトで具体的な議論が求められていくはずです。
CES2026でのデモ出展やFujitsu Technology Parkでの実証は、「研究段階」から「実環境での適用検証」へのステップだと捉えられます。 空間World Modelのような基盤技術は、一社だけで完結するものではなく、ロボットベンダー、カメラメーカー、インフラ事業者、そして現場を運営する企業との連携が鍵になります。 Tech for Human Evolutionの視点に立つと、人がロボットに合わせて動くのではなく、ロボットが人のリズムや文脈を理解して寄り添う未来の一里塚として、この発表を追っていきたいところです。
【用語解説】
Physical AI(フィジカルAI)
現実世界の物理法則や環境の変化を学習し、自律的に行動するAIの総称であり、自動運転やロボティクスなどで研究が進んでいる分野である。
3Dシーングラフ
空間内の人、ロボット、モノの位置関係や相互作用を、ノード(点)とエッジ(線)からなるグラフ構造として三次元的に表現したデータ構造である。
CES(Consumer Electronics Show)
米国ラスベガスで毎年開催される世界最大級のテクノロジー見本市で、家電、モビリティ、ロボティクスなどの最新プロダクトやサービスが発表されるイベントである。
【参考リンク】
JRDB-Social Dataset(外部)
人の行動や行動目的推定の研究に用いられる学術ベンチマークで、屋内外環境での人の軌跡や相互作用のデータを提供している。
Fujitsu Technology and Service Vision 2025(外部)
富士通が示すテクノロジービジョン文書で、AIやロボティクスを通じた社会変革の方向性と重点領域が整理されている。
【参考動画】
【参考記事】
Fujitsu develops new technology to support human–robot collaboration in real-world environments(外部)
空間World Model技術の研究背景、3Dシーングラフ構造、協調動作のユースケース、CES2026での展示計画などを説明する英語公式リリースである。
人とロボットが共存・協働する未来を拓く 空間World Model技術を開発(外部)
富士通の発表内容を技術ニュースとして整理し、Physical AIやWorld Modelの位置づけ、産業分野での活用イメージをコンパクトに解説している。
富士通、人とロボットの共同作業支える新技術(外部)
空間World Model技術を、人とロボットの共同作業を支える新技術として紹介し、一般環境におけるロボット運用課題と解決アプローチを解説している。
「想像」する空間:複数ロボットの協調動作を実現(外部)
空間World Model技術の技術的背景や複数ロボット協調のシナリオを、研究ブログ形式で詳しく紹介している解説記事である。
【編集部後記】
みなさんは、自宅や職場で、自分や家族、同僚の動きや習慣をロボットが学習して先回りして動く状況を、どこまで自然だと感じるでしょうか。 心強いと感じる場面もあれば、「ここは人のままであってほしい」と思う境界線も、きっと一人ひとり違うはずです。
今回の空間World Model技術は、その境界線のかなり手前から、未来の生活や働き方を形づくる土台になっていく技術だと捉えています。 もしオフィスや商業施設、自宅のような身近な場所に、このレベルのロボットが入ってきたとき、自分はどう関わりたいか──そんな視点で、このニュースを一緒に眺めてもらえたらと思います。