
工場や街のどこまでを、人ではなくロボットとAIに任せたいと思いますか。
マクニカが構築した「Physical AI検証環境」は、その問いに現場レベルで答えを探るための基盤づくりを本格的に進めています。
株式会社マクニカ クラビス カンパニーは、協働ロボットについて学習用データ生成から実機検証まで一貫して行える体制を整えたと発表した。
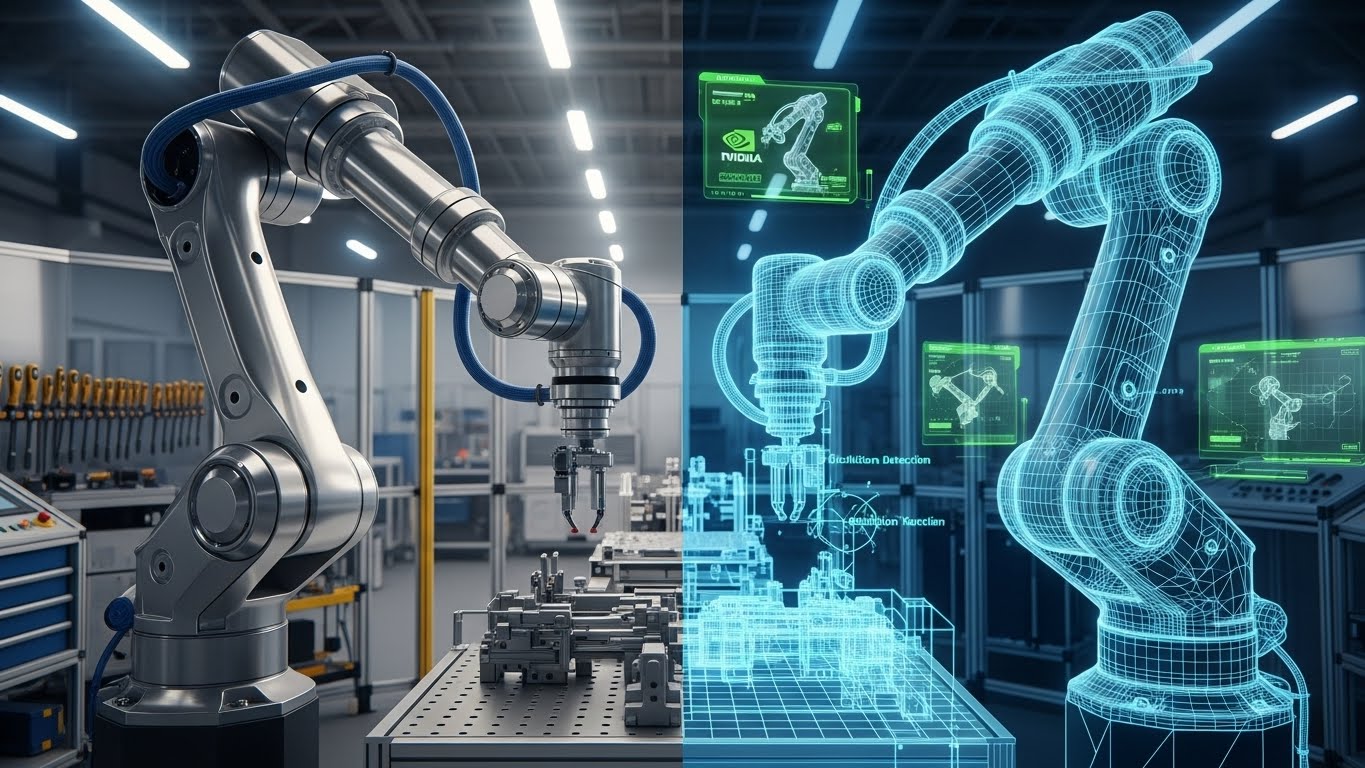
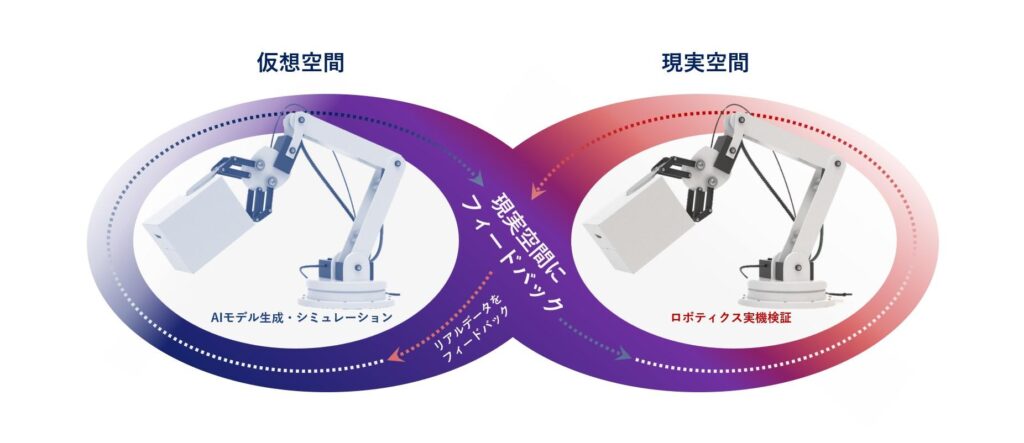
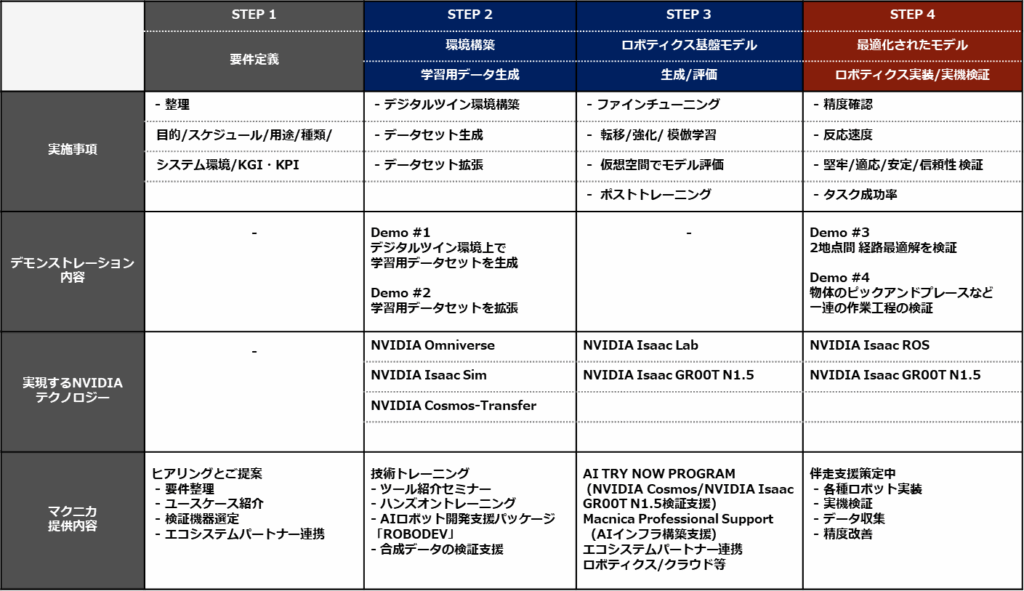
これは協働ロボットの実機と仮想空間シミュレーションを連携させたPhysical AI検証環境を構築し、NVIDIAが提唱する「3コンピューター ソリューション」に加え、Omniverse、Isaac Sim、Cosmos、Isaac ROS、cuMotion、Isaac GR00T N1.5といった最新技術スタックを統合したものである。この環境では、デジタルツイン上で生成したデータセットの拡張や、2地点間の経路最適化、物体のピックアンドプレースなどのデモを通じてシミュレーションと現実のギャップを埋める「ロボティクスAIのSim2Real検証」を可能にし、国内におけるAI実装と社会実装の加速を目指す。
また、2025年12月3日から6日に東京ビッグサイトで開催される「2025国際ロボット展」において、本検証環境を活用したデモンストレーションがブースNo. W4-65で展示される予定である。
From: ![]() マクニカ、Physical AI検証環境を構築し、ロボティクスAI実装を支援
マクニカ、Physical AI検証環境を構築し、ロボティクスAI実装を支援
【編集部解説】
Physical AIというキーワードは、これまで抽象的に語られがちでしたが、マクニカの取り組みは「仮想と現実を往復しながらロボットを育てる」実務寄りの環境として形になりつつあるところが重要だと感じます。 NVIDIA OmniverseとIsaac Simで作り込んだデジタルツインにCosmosの世界モデルを組み合わせ、協働ロボットの実機検証までを1本のパイプラインとして束ねることで、PoCで止まりがちだったロボティクスAIのプロジェクトを次のフェーズへ押し出そうとしているのが今回のポイントです。
難しいのは、「シミュレーションがあるから安全」という単純な話ではないところです。 Cosmosのような世界モデルやIsaac Simの物理シミュレーションを使っても、現実世界の摩擦や劣化、人の予測不能な動きとのギャップは必ず残ります。 それでも、危険作業や災害現場、自律移動ロボットのように現場データを集めにくい分野では、仮想空間でレアケースを大量に作り出して学習させることで、従来よりも高い安全性と迅速な検証サイクルが期待できます。
産業への影響という意味では、製造や物流だけでなく、将来のヒューマノイドロボットの開発基盤とも地続きになっている点が見逃せません。 GR00T N1.5のようなVLAモデルは「見て・指示を聞いて・動く」ロボットを前提にしており、こうした基盤モデルとPhysical AI検証環境がセットになると、日本発の現場ワークフローをそのまま世界に展開できる可能性が広がります。
一方で、Physical AIの進展は、新しいリスクと責任のラインも浮き彫りにします。 シミュレーションで保証されたはずの挙動が現場で崩れたとき、どこまでをモデルの限界として受け入れ、どこからを設計や運用の問題と見るべきかは、エンジニアだけでなく経営や現場マネジメントも巻き込んだ議論が必要になります。 規制面でも、ロボット安全規格や労働安全のルールに、AIモデル更新やシミュレーション検証プロセスをどう組み込むのかが、今後の大きなテーマになっていくでしょう。
今回のニュースは「ロボットの賢さ」よりも「人とロボットの関係性を設計するための試験場ができた」という意味合いが強いと感じます。 現場の作業手順をどこまでロボットに任せ、どこから人の判断を残すのか、その線引きをシミュレーションと実機検証を通じて対話的に探っていく――そのプロセス自体が、これからの仕事や学び方のアップデートにつながっていくのではないでしょうか。
【用語解説】
Physical AI
ロボットや自動運転車などが現実世界の物理法則や環境を理解し、センサー情報にもとづいて行動を決定するAIの総称で、シミュレーションと実機検証を往復しながら学習・運用するアプローチを指す。
Cyber Physical System(CPS)
センサーやネットワークで物理空間とサイバー空間を結び付け、双方向にデータをやり取りしながら制御・最適化を行うシステムの概念で、スマートファクトリーやスマートシティの基盤となる。
Sim2Real
シミュレーション環境で学習・検証したAIモデルを現実世界のロボットやデバイスに適用する際の手法や考え方の総称で、仮想と現実のギャップを小さくするためのデータ設計やモデル調整が重要になる。
Vision-Language-Action(VLA)モデル
カメラ映像などの視覚情報と自然言語による指示を入力として受け取り、ロボットの行動シーケンスを出力するAIモデルで、GR00T N1.5のようなVLAはヒューマノイドロボットへの応用が期待されている。
【参考リンク】
NVIDIA Cosmos – World Foundation Models(外部)
Physical AI向け世界基盤モデルCosmosの概要やユースケースを紹介するNVIDIA公式ページで、ロボティクスや自動運転向けの世界モデル活用が整理されている。
NVIDIA Isaac Sim(外部)
Omniverse上で動作するロボットシミュレーション環境Isaac Simの公式サイトで、デジタルツイン構築や学習用データ生成、ROS連携などの機能が開発者向けにまとめられている。
GR00T N1.5 – Research at NVIDIA(外部)
ヒューマノイド向けVision-Language-ActionモデルGR00T N1.5の研究ページで、モデル構成やトレーニングデータ、ベンチマーク結果などが公開されており、ロボティクス応用の技術的背景がわかる。
【参考記事】
NVIDIA、フィジカル AI 開発を加速する Cosmos 世界基盤モデル プラットフォームを発表(外部)
Cosmos世界基盤モデルとOmniverse連携により、自動運転やロボティクスなどPhysical AI開発を効率化する狙いとアーキテクチャを解説している。
Cosmos World Foundation Model Platform for Physical AI(外部)
Cosmosプラットフォームの技術的詳細を示す論文で、世界モデルの構造や学習データ規模、ロボティクスタスクへの適用方法などを体系的に説明している。
GR00T N1.5 – A Foundation Model for Humanoid Robots(外部)
GR00T N1.5をVLAモデルとして解説し、視覚と言語からヒューマノイドのアクションを生成する仕組みや、工場・物流・サービス分野への応用可能性を整理している技術ブログである。
NVIDIA Cosmosとは?物理AIを可能にする世界モデルの概要(外部)
Cosmosを世界モデルとして位置付け、デジタルツイン連携や合成データ生成により、ロボットや自動運転の開発・検証プロセスを変えるポイントを日本語で紹介している。
NVIDIA開発環境上でのAIエージェントやPhysical AIの事前検証環境の紹介(外部)
OmniverseとIsaac Simを用いた事前検証環境を取り上げ、仮想空間でのテストと合成データ生成を通じて現場導入前のリスク低減と開発スピード向上を図る事例を解説している。
NVIDIA が新しいオープン モデルとシミュレーション ライブラリでロボティクス研究開発を加速(外部)
Isaac系ツールやオープンモデルを通じて、研究者や企業がロボティクス研究開発とPhysical AIの検証を迅速に行えるようにするNVIDIAの取り組みをまとめた記事である。
【編集部後記】
ロボットが現実の工場や街の中で働き始めるとき、そこで更新されていくのはテクノロジーだけでなく、私たちの働き方や役割そのものだと感じます。 単純作業の自動化だけでなく、危険な場所の点検や夜間巡回のように、人間には負荷の大きい仕事も候補に入ってきますが、同時にシミュレーションと現実のズレや、判断ミスが起きたときの責任の所在など、細かな問いも出てくるはずです。
もしあなたの職場や興味のある分野で「ここにPhysical AIやロボットが入ったら、何が変わるだろう?」と思う場面があれば、そのイメージをぜひ言葉にしてみてください。その視点こそが、これからのテクノロジーと人との関係のコンパスになるはずです。