

2025年2月、Figure AIが発表した最初のHelixは上半身を滑らかに制御できるヒューマノイドとして注目を集めました。それからわずか1年。2026年1月26日に発表されたHelix 02は、「歩行」と「操作」を統合する—ロボット工学が何十年も解けなかった難問に、ひとつの答えを示しています。
物を持ち上げればバランスが変わり、一歩踏み出せば到達範囲が変わる。腕と脚が互いに制約し合うこの問題を、従来のロボットは「歩く→止まる→掴む→また歩く」という段階的な制御で回避してきました。しかしHelix 02は、1,000時間以上の人間動作データから学習した新しいAI基盤「System 0」により、歩きながら運び、姿勢を変えながら掴む——連続した全身制御を実現しました。
4分間で61のアクションを自律実行し、3グラムの力を感じ取る指先で錠剤を1つだけ取り出す。ヒューマノイドロボットは今、実用化への新たな段階に入りつつあります。
From: ![]() Introducing Helix 02: Full-Body Autonomy
Introducing Helix 02: Full-Body Autonomy



【編集部解説】
今回のHelix 02発表で最も注目すべきは、ロボット工学における「何十年も未解決だった問題」を解いたという点です。ロコマニピュレーション、つまり移動と操作を同時に行う能力は、どちらか単独なら実現できても、両方を統合すると極めて困難になります。物を持ち上げればバランスが変わり、一歩踏み出せば到達範囲が変わる。腕と脚は互いに制約し合うため、従来のロボットは「歩く→止まる→安定させる→掴む→また歩く」という段階的な制御に頼らざるを得ませんでした。
Figureが開発したSystem 0は、この問題に対する根本的なアプローチの転換を示しています。従来は歩行用、旋回用、しゃがむ用など、個別の動作ごとに報酬関数を人間が設計していました。しかしSystem 0は1,000時間以上の人間の動作データから直接学習し、109,504行の手作業C++コードを1,000万パラメーターのニューラルネットワークに置き換えました。これは単なる効率化ではなく、人間がどのようにバランスを取り、力を協調させるかという暗黙知を、データから抽出できることを意味します。
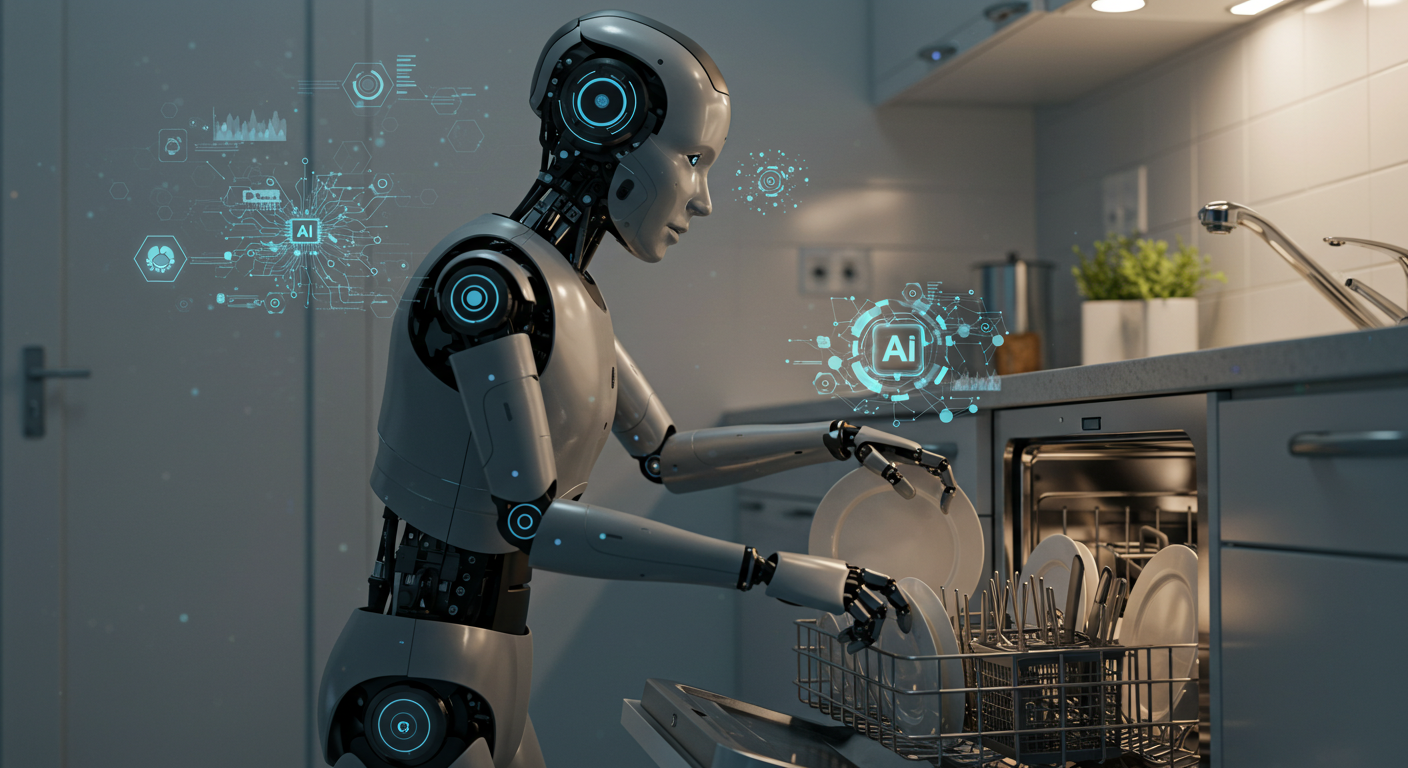
3層のアーキテクチャ設計も巧妙です。System 2が「食器洗い機まで歩いて開けて」という高レベルの目標を理解し、System 1が200 Hzで視覚・触覚・固有受容感覚を統合して全身の関節目標値に変換し、System 0が1 kHzで実際の身体制御を実行する。この階層化により、各層が最適な時間スケールで動作でき、人間の認知構造に近い処理が可能になっています。
Figure 03に搭載された手のひらカメラと触覚センサーは、特に重要な技術要素です。3グラムという微細な力を検出できる指先センサーは、ペーパークリップを感じ取れる感度を持ち、頭部カメラから遮蔽された物体も手のひらカメラで視認できます。これにより、薬箱から錠剤を1つだけ取り出す、注射器から正確に5 mlを分注するといった、5本指の器用さを最大限活用するタスクが初めて可能になりました。
産業応用の観点では、FigureはすでにBMWの製造施設との商業契約を締結しており、実際の製造現場からの金属部品をHelix 02が扱うデモも公開されています。2024年2月には評価額26億ドルで6億7,500万ドルを調達し、Microsoft、OpenAI、NVIDIA、Jeff Bezosなどが投資しています。さらに2025年には、一部報道により、Figureが評価額約395億ドル規模で資金調達を協議していると伝えられました。ただし、これは公式に確定・発表された評価額ではなく、交渉段階に関する報道であり、今後変更される可能性があります。
一方で、課題も明確です。4分間のデモは印象的ですが、実際の家庭や工場で何時間も連続稼働し、予期しない状況に対応できるかは未知数です。また、人間と同じ空間で働くヒューマノイドロボットには安全性、責任の所在、雇用への影響といった社会的・倫理的な問題が付随します。ロボット研究者の間では、技術的成熟度は高まっているものの、大規模展開には「システムレベルのボトルネック」が存在し、安全規制、法的責任、組織の調整などの課題をクリアする必要があると指摘されています。
長期的には、Helix 02のようなエンドツーエンドの学習システムが、データ量の増加とともにどこまでスケールするかが鍵となります。他の競合企業も基盤モデルの大規模化に取り組んでおり、「知能の閾値」を超える段階的な性能向上が観察されています。Figureが「スケールを拡大し続けるにつれて何が起こるか」を楽しみにしていると述べているのは、この技術がまだ初期段階であり、今後さらなる進化が期待できることを示唆しています。
【用語解説】
ロコマニピュレーション
移動(Locomotion)と物体操作(Manipulation)を同時に行う能力。ロボットが歩きながら物を運ぶ、姿勢を変えながら物を掴むなど、両方の動作を統合して実行する技術。従来は別々のシステムとして制御されていたが、統合すると相互制約が複雑になるため、ロボット工学の長年の課題とされてきた。
ニューラルネットワーク
人間の脳神経回路を模した機械学習モデル。入力データから特徴を抽出し、層を重ねることで複雑なパターンを学習する。Helix 02では視覚、触覚、運動制御を単一のネットワークで統合している。
パラメーター
ニューラルネットワークが学習によって調整する内部変数の数。System 0は1,000万パラメーターを持ち、これが人間の動作パターンを再現するための「知識」として機能する。
固有受容感覚
身体の各部位の位置、動き、力の状態を感知する感覚。人間が目を閉じていても手足の位置がわかるのと同様、ロボットが関節の角度や速度を内部的に把握する能力。
Hz(ヘルツ)/ kHz(キロヘルツ)
1秒あたりの処理回数を示す単位。200 Hzは1秒間に200回、1 kHz(1,000 Hz)は1秒間に1,000回処理することを意味する。高速な制御ほど滑らかで安定した動作が可能になる。
エンドツーエンド学習
入力から出力まで、中間処理を人間が設計せずに、システム全体を一貫して学習させる手法。Helix 02では「ピクセル(画像)から全身制御(トルク)まで」を単一のシステムで学習している。
アクチュエーター
電気信号を物理的な動きに変換する駆動装置。ロボットの関節を動かすモーターなどが該当する。
【参考リンク】
Figure AI 公式サイト(外部)
ヒューマノイドロボット開発企業Figureの公式サイト。Helix 02の詳細な技術情報、デモ動画を掲載
OpenAI(外部)
大規模言語モデルChatGPTを開発。Figureとの協力協定を締結し、ロボットの言語理解能力向上に貢献
BMW Group(外部)
ドイツの自動車メーカー。Figureと製造施設での商業契約を締結し、産業応用を実証している
【参考動画】
Introducing Helix 02: Full-Body Autonomy – Figure AI
Figure AI公式によるHelix 02の解説動画。4分間の自律タスク実行、器用な操作のデモ映像、技術的背景を視覚的に理解できる。
【参考記事】
Figure Raises $675M at $2.6B Valuation and Signs Collaboration Agreement with OpenAI(外部)
2024年2月の資金調達発表。評価額26億ドルで6億7,500万ドルを調達、Microsoft、OpenAI、NVIDIAなどが投資
Figure AI unveils Helix 02 with full-body robot autonomy(外部)
Investing.comによる2026年1月27日の報道。3層アーキテクチャの役割分担、産業応用への期待を解説
Humanoid Robotics: From Technical Breakthrough to System-Level Challenge(外部)
2026年1月29日の分析記事。大規模展開には安全規制、法的責任などシステムレベルの課題が存在と指摘
Humanoid Locomotion and Manipulation: Current Progress and Open Problems(外部)
2025年1月のarXiv論文。ロコマニピュレーションの歴史的課題と現在の進展状況を学術的に解説
【編集部後記】
皆さんは、ロボットが人間の動きを1,000時間以上観察して学ぶという発想をどう感じますか?私たちが日常で無意識に行っているバランスの取り方や力加減が、データとして抽出され、機械に移植される。そんな時代がすぐそこまで来ています。
もし自宅にHelix 02のようなロボットがいたら、どんな作業を任せたいでしょうか。食器洗い機の片付け、洗濯物の整理、それとも介護や育児のサポート?あるいは、人間にしかできない領域はどこにあると思いますか?
ぜひSNSで、皆さんの率直な意見を聞かせてください。一緒に未来を考えていきましょう。